New insect-sized robots mimic the movement of living muscles
Robotic earthworms might be human helpers in the near future. (AP Photo/Dean Fosdick)

Inspired by the efficient behavior of insect muscles, researchers have developed tiny electrostatic actuators that could have wide-ranging applications in robotics. Their innovations include earthworm-scale robots designed to inspect tight spaces, such as the inside of aircraft engines or dangerous debris fields.
The study, published March 31 in The International Journal of Robotics Research, also demonstrates the clinical applications of a novel surgical tool inspired by intestinal muscles that conforms to the surface of an endoscope — an instrument for looking inside the body — and is designed for cutting and penetrating tissue.
Hongqiang Wang, a researcher at Southern University of Science and Technology in Shenzhen, China and first author of the paper, is focused on developing actuators — the part of a robot responsible for converting energy into motion — especially for the creation of artificial muscles.
"Artificial muscles mimic human or animal muscles," he said in an interview with The Academic Times. "Animal muscles are very amazing — looking inside, their structure is similar in an ant muscle or an elephant muscle. It's a surprise, you know, that their muscles are so similar in structure when they're very different in size."
That isn't the case in robots — at least, not yet. Electromagnetic motors don't work well at the millimeter scale. So, creating tiny actuators to give motion to insect-sized robots is "a huge challenge," Wang said. "Control is another aspect. If you are a scientist working on an actuator, you build it and if it can move and output force, that's enough. But we're working on a robot, so we must not only consider force and motion but also control. All these things are very important."
Roboticists often look to the natural world for inspiration. Researchers in China have been developing material for soft robots that can bend, straighten and heal itself, while U.S. scientists are working separately to develop artificial muscles that could allow sci-fi military advances, such as shark-like submersibles and multi-legged walkers right out of "Star Wars."
Taking cues from the precise-yet-forceful movements of insects, Wang and his colleagues sought to recreate the hierarchical structures of living muscle fiber. In other words, they built and connected their systems from the nanoscale scale on up. The researchers designed layers of micrometer-sized electrodes, integrating them to create laminates of mostly flexible materials, and found that their power-density is comparable to that of real muscles.
Not to mention, the artificial muscles are elastic and "can bend, release stress and recover back," Wang said. The materials used to construct the actuators are basic: copper for the electrodes and the plastic polyimide for insulation.
"Most smart polymers are based on special, very expensive materials," Wang said. "In our case, we use normal nonconductive material for insulation and normal conductive material for electrodes. It's very cheap and very easy to build."
The team members first demonstrated their technology with the ultra-thin, earthworm-inspired robot, which is capable of traversing a 5 mm-wide channel or a 19 mm square tube while equipped with an onboard camera. Their robot can squeeze through narrow gaps while carrying out inspections of, say, a jet engine's complex system of fans, turbines and combustion chambers. "Currently, they use an endoscope," Wang said of jet-engine inspections. "It's a passive pipe; you can push it inside but hardly control its direction or inspect every corner."
"Our earthworm robot's cross-section is so small, we think it could also be used for search-and-rescue after a disaster like an earthquake," he continued. "If we have an insect-sized robot, we can assign it to search for people embedded [in rubble] and find them."
The group's intestine-inspired robot is similarly slender and designed for agility in tight spaces, but with a focus on surgical settings. "We've demonstrated the actuator can penetrate tissue and cut quickly; it's available for practical use," Wang explained. "Now we're trying to integrate it with other surgical tools like an endoscope and focusing on surgical [applications]."
Another advantage of the team's tiny surgical robot is that it is driven by an electrostatic field, rather than an electromagnetic one, Wang said. That means surgeons could still use an MRI machine to guide their incisions without worrying about magnet-on-magnet interference.
Wang believes that the power density of the artificial muscles could be improved many times over, and that the technology is scalable and could eventually work in both insect- and elephant-sized robots. But his team's technology is in its early stages — that refinement will come with follow-up experiments, which have already begun. "We're just starting to explore how to design, drive and use the robot," he said. "This is just a small start. It's an infant."
The study, "Biologically inspired electrostatic artificial muscles for insect-sized robots," published March 31 in The International Journal of Robotics Research, was authored by Hongqiang Wang, Southern University of Science and Technology; Peter York, Conor Walsh and Robert J. Wood, John A. Paulson School of Engineering and Applied Sciences and Wyss Institute for Biologically Inspired Engineering, Harvard University; Yufeng Chen, Massachusetts Institute of Technology; and Sheila Russo and Tommaso Ranzani, Boston University.
Related sections

Engineering, Mind & Behavior
The brain’s perception of colors is distinct from our words for them

Mind & Behavior
Your posture could impact your memory
By Tara DiMaio

Social Sciences, Mind & Behavior
Political ads might cause clinical anxiety
By Ariane Lange

Social Sciences, Business & Economics
Developed nations profit by exploiting the global South
By Ariane Lange

Life Sciences
‘Decoy’ peptide shows promise for preventing heart failure
By Asher Jones
Physical Sciences, Engineering
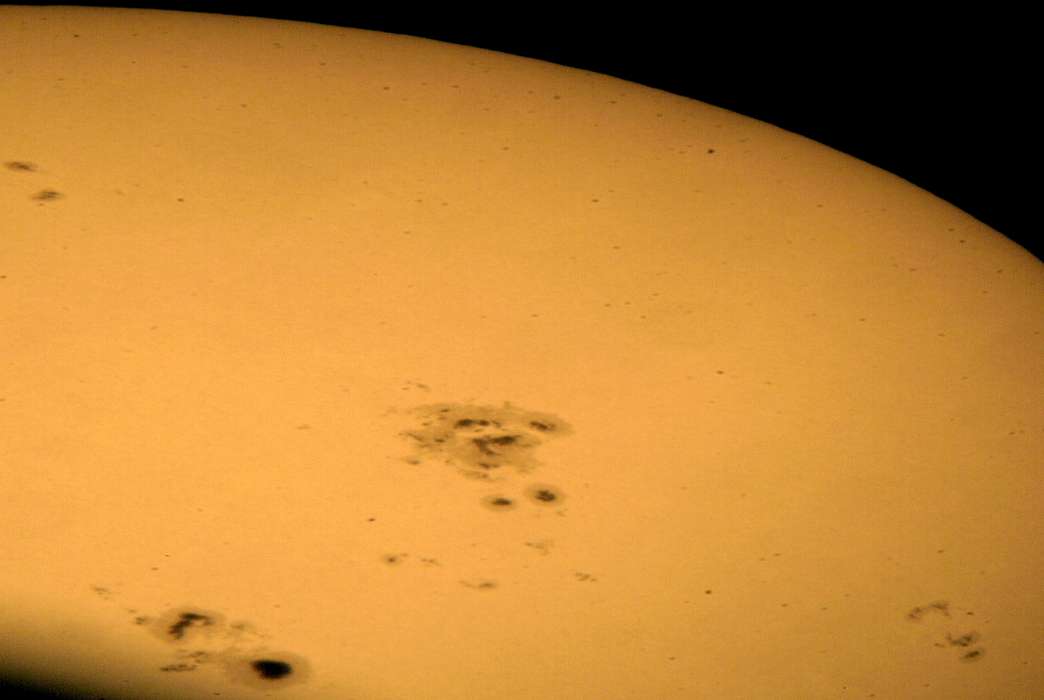
Smartphones can detect huge solar storms
Physical Sciences
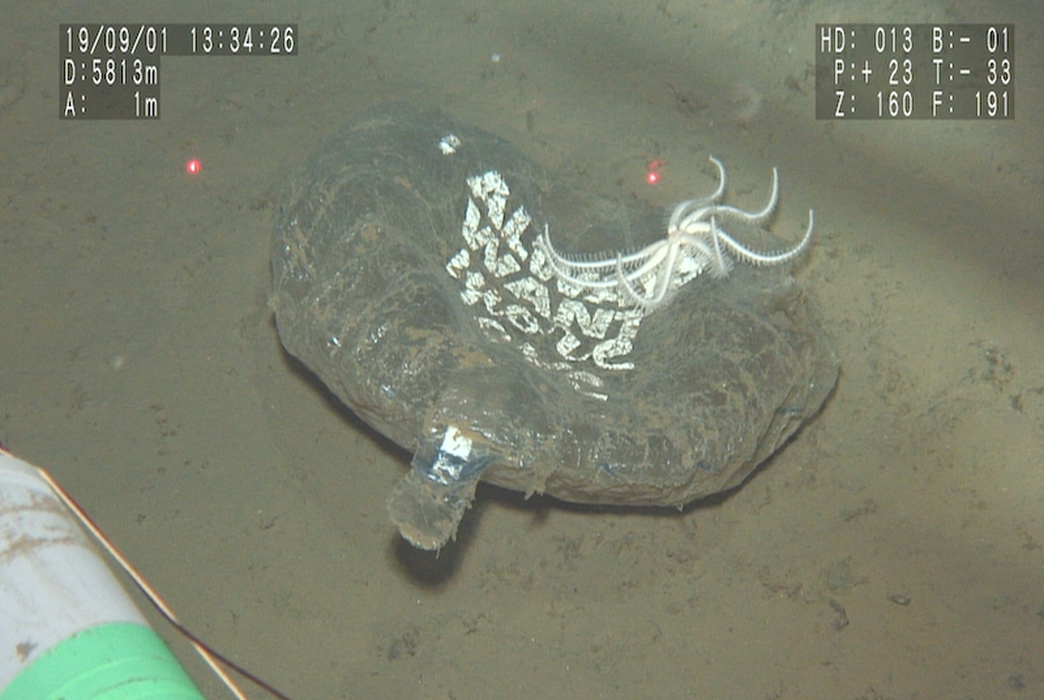
Single-use plastics dominate debris on the North Pacific's deep ocean floor
By Miles Martin
Physical Sciences, Engineering
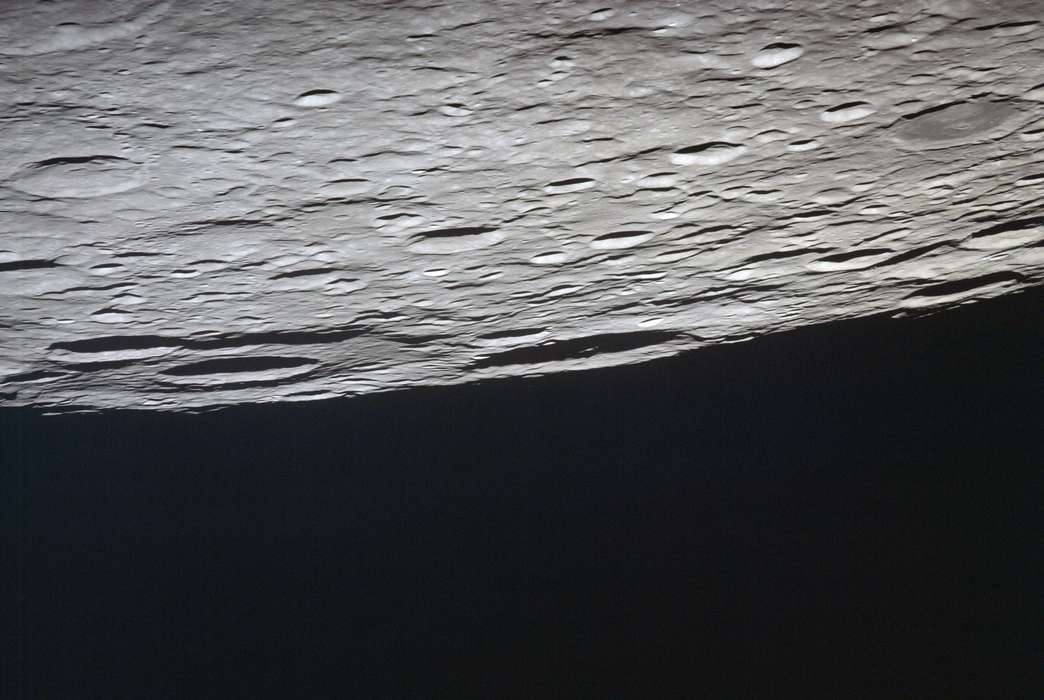
Scientists propose using the moon to detect gravitational waves
By Zack Fishman

Mind & Behavior, Social Sciences
Getting preschool kids to eat more vegetables may be easier than you think
By Tara DiMaio

Physical Sciences
Earthquakes in Italy tracked to mounting volcanic pressure, temperature